Информация пресс-службы Института механики и машиноведения имени академика У.А.Джолдасбекова: в Казахстане впервые разработан и изготовлен прототип тросового параллельного робота
В последние годы мировым научным сообществом большое внимание уделяется исследованиям нового вида параллельных роботов, таких как тросовые параллельные роботы (ТПР). ТПР - это параллельные роботы с гибкими звеньями (тросами), имеющие большой потенциал для применения в сельском хозяйстве - при автоматизированном сканировании изображений для фенотипирования сельскохозяйственных культур, для автоматизированного строительства, контроля внешнего состояния оболочек резервуаров и другого применения в промышленности.
Тросовые параллельные роботы состоят из конечного эффектора и основания, которые соединяются несколькими тросами. Конечный эффектор работает с помощью приводов, которые могут выдвигать или втягивать тросы.
В отличие от параллельных роботов с жесткими звеньями, в тросовых параллельных роботах (ТПР) движение рабочему органу передается через гибкие тросы. Именно наличие передачи движения рабочему органу ТПР через тросы, позволяет увеличить рабочую зону обслуживания ТПР. По сравнению с классическими параллельными роботами, ТПР имеют большое рабочее пространство, более простую структуру, хорошие динамические свойства, высокую грузоподъемность, мобильность и низкую стоимость.
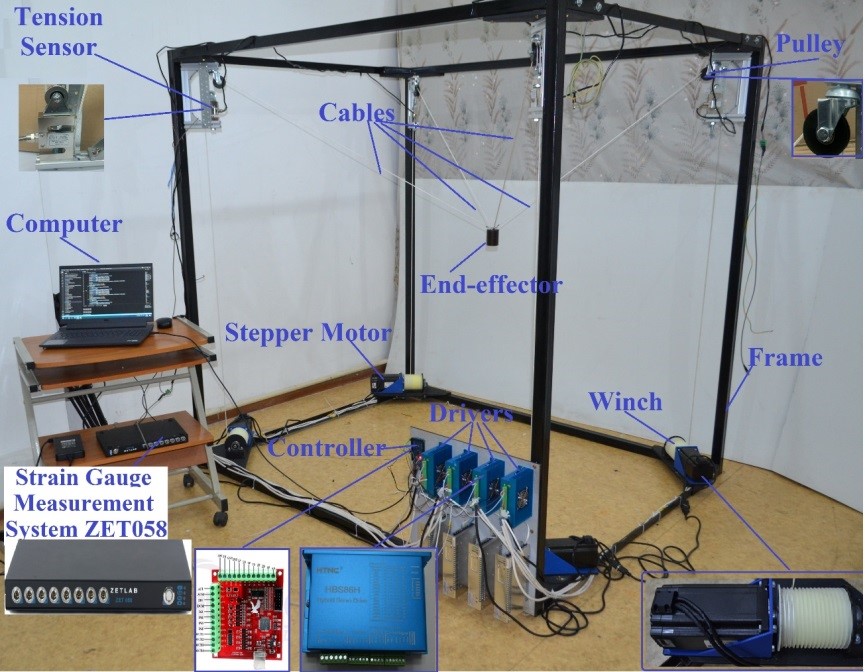
В Институте механики и машиноведения имени академика У.А.Джолдасбекова впервые в Казахстане был разработан и изготовлен прототип тросового параллельного робота, который состоит из неподвижной прямоугольной рамы, четырех лебедок, четырех гибридных шаговых двигателей с драйверами и четырех тросов.
Прототип ТПР оснащен четырьмя датчиками силы для экспериментального определения силы натяжения тросов. Датчики силы подключены к измерительной тензометрической системе ZET 058. Прототип ТПР имеет возможность ручного управления поступательным движением концевого эффектора: вперед-назад, влево-вправо, вверх-вниз.
Прототип ТПР планируется использовать для научных исследований, а также для проведения студентами лабораторных работ. Применение прототипа ТПР в учебном процессе курса робототехники позволит студентам быстрее понять структуру и особенности данного нового вида параллельного робота.